Toute l’activité
- Aujourd’hui
-
Bonjour. Après un hivernage depuis le 1er novembre durant lequel j'ai branché tous les mois mon robot tondeuse Husqvarna 310 (jusqu'à ce samedi- il était juste brancher, je ne le faisais pas tondre), j'ai remis ce robot en fonction en le remettant sur sa station de charge. Cela fait donc 3 jours. J'ai mis un planning qui le fait (devrait le faire) fonctionner 24h sur 24. Ne le voyant pas bouger, j'ai regardé le mode d'emploi, la lumière et j'ai vu que le souci pouvait venir du câble abîmé (j'ai commandé un appareil pour trouver la partie abîmée). J'ai démonté la station de charge et j'ai contrôlé ce que je pouvais comme câbles et branchements. A cet endroit, ils ne sont pas abîmés. J'ai inversé les connecteurs comme indiqué dans le mode d'emploi mais la lumière reste bleue clignotante tout le temps. J'ai tenté de faire un nouveau signal boucle via le menu. Ça me dit "connexion inchangée". Le mode d'emploi indique que ça peut être du à une déconnexion du robot de la station de charge. Mais pour l'hivernage, on est bien obligé non ? Sinon comment le reconnecter à la station de charge et résoudre ce problème, svp ? Je vous remercie par avance pour votre aide. Cordialement. Patrick
-
 Tashunca a rejoint la communauté
Tashunca a rejoint la communauté - Hier
-
 hyspeedy a rejoint la communauté
hyspeedy a rejoint la communauté -
Bonjour, le 13 avril un magasin de motoculture du coin vient me présenter le Luba 3 AWD 3000 pour un essai dans mes pentes. Je verrai ce qu'il en retourne ? Pour le moment J'ai également un Automower 420 depuis 2017 et j'en suis satisfait sauf que certains lieu très pentus ne lui sont pas accessible.
-
Bonjour la communauté, Me revoilà, avec de nouveau mon AM qui ne trouve pas sa base. Il a bien fonctionné jusqu'à sa mise au repos pour l'hiver. Remis en service le 04 mars, suite à un temps plus clément et ensoleillé, le terrain a séché un petit peu. Le 05 mars, l'AM fait son job (2 jours de fonctionnement sans accrocs). Le 06 mars, temps humide dans la nuit, petites pluies éparses, et voilà que mon AM se remet à zozotter. Il sort correctement, mais lors de son retour vers la station, à quelques mètres de celle-ci, j'ai l'impression qu'il perd partiellement le signal guide (zigzag autours de celui-ci), il parvient quand même à s'aligner avec elle, mais il stoppe après avoir posé ses roues avant sur la plaque, recule, puis se remet en recherche de position pour tenter un nouvel arrimage. J'ai l'impression qu'avec un terrain plus ou moins sec, l'arrimage se passe bien. Terrain humide, c'est la cata. Pour rappel, j'ai eu l'occasion de faire un test croisé avec l'AM de mon voisin (même modèle). - Mon AM sur son terrain: Arrimage impossible, il s'est présenté décalé devant la station et a poussé sur une partie du dock. - l'AM de mon voisin sur ma base: Tout est ok. Donc très certainement un problème sur le mien. J'envisage de changer, pour commencer, le capteur de boucle avant. Qu'en pensez-vous? Des idées sur le fait que l'AM fonctionne sur terrain sec, et pas humide? Je mets ci-dessous, les différentes mesures de signal relevées. Date Commentaire Capteur A G1 F N Qualité Dans la station 06/03/2026 10:54 Roue AG sur dalle terrasse Av G -149 -50 6 0 100 Non en train de glisser Av D 146 -51 0 0 Ar G -147 -48 5 -1 Ar D 177 -53 -10 0 06/03/2026 15:32 Perdue, à moins de 2m à droite Av G 115 76 76 15 100 Non de la station Av D 146 92 119 54 (Regard Face Station) Ar G 155 101 114 44 Ar D 159 100 106 33 06/03/2026 15:33 Posée devant station, à droite Av G 132 89 152 98 100 Non Av D 153 108 186 129 Ar G 147 96 153 47 Ar D 147 110 150 60 06/03/2026 15:33 Posée devant station, à gauche Av G 121 -65 144 -84 100 Non Av D 156 -96 201 -127 Ar G 149 -92 148 -72 Ar D 149 -100 153 -60 06/03/2026 15:36 En charge Av G 140 75 -301 116 100 Oui Av D 181 120 -300 -307 Ar G 162 -300 -255 -140 Ar D 167 -307 -267 142 06/03/2026 17:43 Roues avant juste devant Av G 160 -90 -175 98 100 Non la plaque de la station Av D 160 94 1 132 Ar G 151 -106 172 -71 Ar D 151 99 172 69 06/03/2026 17:43 Roues avant posées sur le début Av G 166 -85 -302 -135 100 Non de la plaque de la station, Av D 166 98 -298 -228 AM a stoppé son avancée à peu Ar G 156 -105 195 -99 près selon cette position Ar D 155 107 196 97 06/03/2026 17:44 AM avancée au maxi sur la station, Av G 177 47 -291 150 100 Non mais pas en charge Av D 178 108 -298 -306 Ar G 165 -101 223 -145 Ar D 164 110 227 145 06/03/2026 15:45 En charge Av G 140 74 -300 131 100 Oui Av D 182 121 -301 -308 Ar G 162 -100 -257 -142 Ar D 168 117 -268 -144 Grand Merci pour vos suggestions.
-
 pat324 a rejoint la communauté
pat324 a rejoint la communauté -
Bonjour Le Luba2 ne passe pas encore partout J'en suis toujours aux réglages : Hauteur de coupe, périmètre (nombre de tours, au début ou à la fin de la tonte), forme du trajet etc Il y a énormément de possibilités et j'explore... Mon Automower 220 est de 2009, elle passait partout sans laisser de traces mais ne s'arrêtait que la nuit, un vrai tapis. A+
- La dernière semaine
-

Actualisation connect très longue
Blackbird a répondu à un(e) sujet de Blackbird dans Bugs, entretien et dépannage
Bonjour, oui je l'ai fait mais ça n'a rien changé. J'ai bien toutes les informations qui remontent, c'est juste l'actualisation de la position sur la carte et le pourcentage de batterie qui mets vraiment beaucoup de temps à s'actualiser. Vraiment bizarre ce comportement -
Messages indisponibles dans l'application Automower connect
Fred a répondu à un(e) sujet de jls85390 dans Bugs, entretien et dépannage
Bonjour, qu'elle est la version de l'app ? (C'est Android il me semble ? ) Du côté Apple je n'ai même pas ce menu message -
Tu peux détailler ? Il y a plusieurs générations d'cart entre ton ancien 220 et le Luba 2. Cela m'étonne fortement.
-
 Fred a réagi à un message dans un sujet :
J’ai perdu la roue de mon Automower 420
Fred a réagi à un message dans un sujet :
J’ai perdu la roue de mon Automower 420
-
Actualisation connect très longue
Fred a répondu à un(e) sujet de Blackbird dans Bugs, entretien et dépannage
Bonjour, avez-vous essayé de supprimer et de refaire l'appairage au robot ? -
panne au démarrage de printemps
Fred a répondu à un(e) sujet de fniala dans Bugs, entretien et dépannage
Bonjour, et donc le problème est réglé ? OU j'ai mal compris ? La station a-t-elle été dépoussiérée ? -
 siber3210 a rejoint la communauté
siber3210 a rejoint la communauté -
Actualisation connect très longue
siber3210 a répondu à un(e) sujet de Blackbird dans Bugs, entretien et dépannage
Bonjour. J'ai le même problème. Pas de réponse apparemment -

J’ai perdu la roue de mon Automower 420
patdxfr a répondu à un(e) sujet de Vp42000 dans Bugs, entretien et dépannage
ça m'est aussi arrivé, il y a une rondelle au bout (normalement) qui vient se pincer sur l'axe. De mon côté, j'ai fileté l'axe et mis un écrou nylstop Pat_2b -
Bonjour, en effet Michel33 l'amplificateur WifI externe est une bonne chose pour éviter les zones blanches. Juste avant la reprise il y a 1 mois j'ai fait une petite dalle béton qui supporte la base de recharge et évite les fameux "nuggets" (ronds liés au x roues quand le rebot cherche la base). Il faut impérativement que l’arrière du robot et l'infrarouge de la station soit bien alignés > surface bien droite, pas de pente et prévoir 1m10 de longueur devant la station. PS : J'ai remis le robot en route le we dernier, reconnecter le robot et direct il refonctionne nickel, aucun souci malgré l'herbe un peu haute. RAS ! Franchement : A part le Lymow je ne connais pas de robot aussi costaud mais pour l'instant c'est le meilleur pour moi. Bonne tonte....
-
Merci bien Michel33 pour toutes ces présisions.
-
Bonjour Je viens de remettre en service celui que j'ai acheté en fin d'année dernière Il fait le job. Ce n'est pas aussi net qu'avec mon ancien Automower, mais je lui confie maintenant 5000 m² et il n'est passé qu'une fois, donc je patiente. Avant c'était seulement 2000 ùm² Si on regarde la différence de prix, je suis content de mon achat, surtout que je ne sais pas comment les nouveaux Husqvarna auraient laissé mon terrain Pour répondre à tes questions : Appli en français Connexion Wifi, c'est vrai que j'ai dû y travailler mais j'ai ajouté ça "Point d'accès sans fil extérieur - WAVLINK - AC1200" pour 60 €uros et je n'ai plus de problème Lorsque j'ai fait appel au SAV par mail, j'ai eu des réponses sous 24 h Le problème qui me reste est qu'il laboure à 1.5 m de son garage en rentrant, surtout avec l'humidité actuelle . je vais devoir faire un aménagement spécial A+
-
Bonjour les utilisateur de LUBA 2 5000. Je suis entrain de me tâter pour l'achat de ce modèle mais j'ai un peu parcouru ce forum. Ce qui me gêne: -Apparemment l'appli est en Anglais -80% de pente c'est limite sur mon terrain -soucis de connexion wifi, antenne, -service après vente difficilement joignable Dite moi ce qu'il en est à ce jour ? Merci à toutes & tous
-
bonjour, j'ai démarré mon robot le 28/02 et hier il tournait en rond , impossible de le connecter, après vérification j'ai vu que la station n'était plus allumée.donc vérification du transfo et bien 24v donc j'ai ouvert l'abri de la station et en bougeant le connecteur j'ai entendu un bip et c'était bon, le robot à peut reconnaître le signal de boucle.
-

J’ai perdu la roue de mon Automower 420
fniala a répondu à un(e) sujet de Vp42000 dans Bugs, entretien et dépannage
bonsoir , en cherchant j'ai trouvé celà https://evergreen-33.com/fr/accueil/156-kit-roue-avant-robot-husqvarna-320-330x-420-430x-440-450x-7392930553378.html -
J’ai perdu la roue de mon Automower 420
fniala a répondu à un(e) sujet de Vp42000 dans Bugs, entretien et dépannage
merci, pour l'info -
 jls85390 a rejoint la communauté
jls85390 a rejoint la communauté -
Messages indisponibles dans l'application Automower connect
jls85390 a posté un sujet dans Bugs, entretien et dépannage
Bonjour, Je n'ai plus accès aux messages dans l'application automower connect. Du coup, je ne reçois plus les alertes lorsque le robot est bloqué 😞 L'option "Messages" est grisée donc inaccessible. J'ai réinstallé l'appli mais idem. Problème identique sur un autre smartphone, donc je pense que ça vient du robot ... Merci de votre aide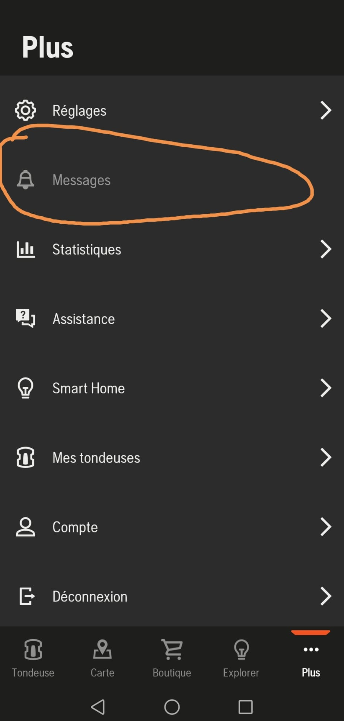
- Avant
-
J’ai perdu la roue de mon Automower 420
Fred a répondu à un(e) sujet de Vp42000 dans Bugs, entretien et dépannage
Ici par exemple : https://www.gplshop.fr/fr/roue-kit-320-330x-420-430x-440-450x -
J’ai perdu la roue de mon Automower 420
fniala a répondu à un(e) sujet de Vp42000 dans Bugs, entretien et dépannage
bonjour j'ai eu le même problème et en attendant j'ai fait une réparation moi-même qui tient toujours depuis juillet 24 .pour ceux qui veulent de peux donner des détails où peux t-on trouver des roues correspondantes à un prix correct merci -
[Fred] 330X - 25 ares - Automower Connect
Fred a répondu à un(e) sujet de Fred dans Installation de votre robot
C'est reparti pour une nouvelle saison. Tonte ce week-end au tracteur tondeuse pour diminuer en hauteur. Je le referai encore certainement une seconde fois la semaine prochaine et ensuite je laisserai le robot se charger du reste -
 joce a rejoint la communauté
joce a rejoint la communauté -
Bienvenue parmi nous @Patrick02 Fan d'Alpine ?
-
Sileno life 1000 n’engage plus de tontes
Fred a répondu à un(e) sujet de frazap dans Bugs, entretien et dépannage
Merci pour le retour. -

Sileno life 1000 n’engage plus de tontes
frazap a répondu à un(e) sujet de frazap dans Bugs, entretien et dépannage
C’est cela carte mère qui est hs, elle a pris de l’humidité . Résolu .



