pvodoz
-
Compteur de contenus
6 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Events
Tout ce qui a été posté par pvodoz
-
Aide à l'installation et à la configuration
pvodoz a répondu à un(e) sujet de pvodoz dans Installation de votre robot
WhatsApp Video 2025-10-13 at 19.08.01.mp4 -
Aide à l'installation et à la configuration
pvodoz a répondu à un(e) sujet de pvodoz dans Installation de votre robot
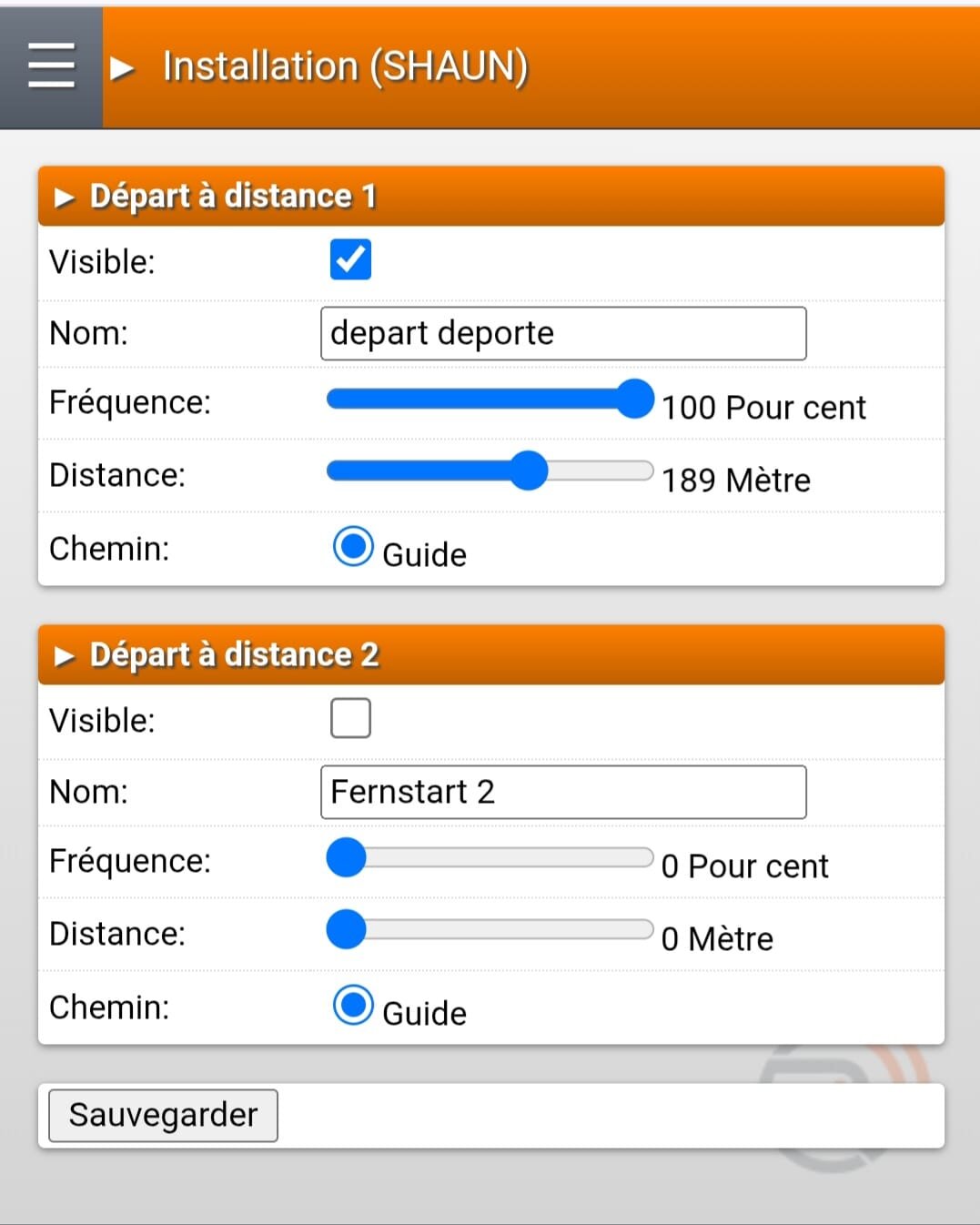
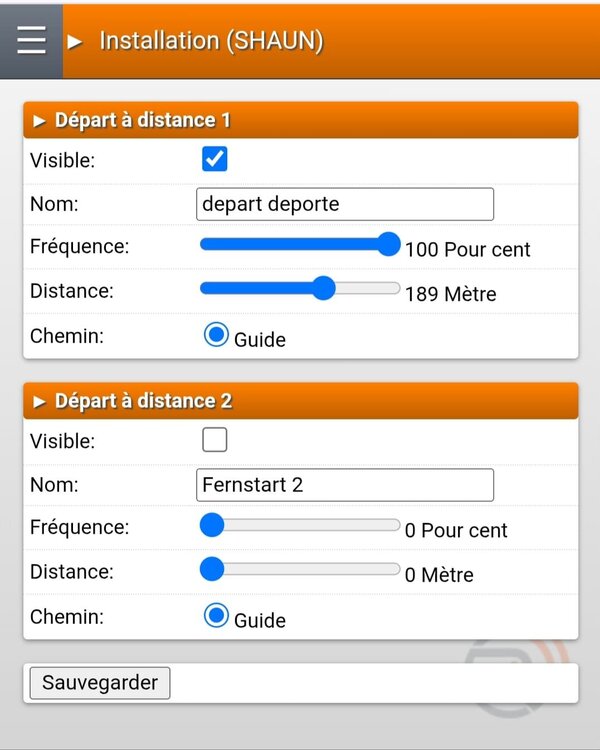
@Chris50, Je reviens pour donner des nouvelles. Concernant le retour, cela fonctionne parfaitement avec l'emplacement des fils périphériques que tu m'as indiqué. En revanche, pour la sortie, c'est une catastrophe. Voici la configuration des différents menus: Lorsque je fais un test de sortie sur l'aire de départ 1, le robot pars de la base. A peine les roues en dehors de la base, il marque un petit temps d'arret puis on voit qu'il suit le fil guide. Mais au bout de 40 ou 50 cm, il fait un quart de tour sur la droite, une marche arrière, et vient passer sa roue arrière par dessus la bordure... Je ne comprends pas pourquoi il ne continue pas son chemin tout droit sur le fil guide.....thumb.jpeg.cbbc1f01965ec1647d0322cb7b15cdb6.jpeg)
-
Aide à l'installation et à la configuration
pvodoz a répondu à un(e) sujet de pvodoz dans Installation de votre robot
Merci @Chris50, effectivement, je vais tenter cela ce week-end (si le temps le permet 😅) et je reviendrai pour donner le résultat! -
Aide à l'installation et à la configuration
pvodoz a répondu à un(e) sujet de pvodoz dans Installation de votre robot
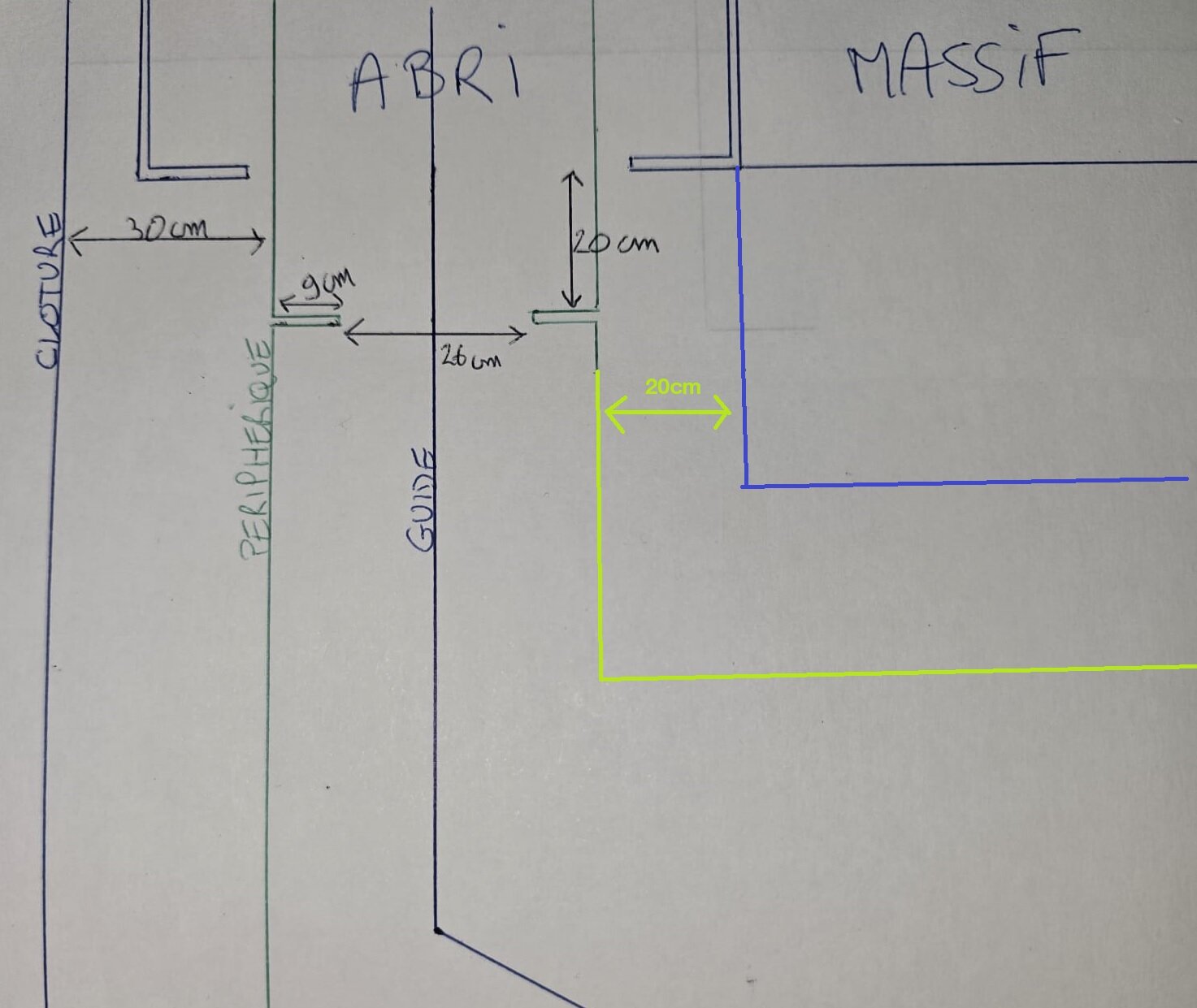
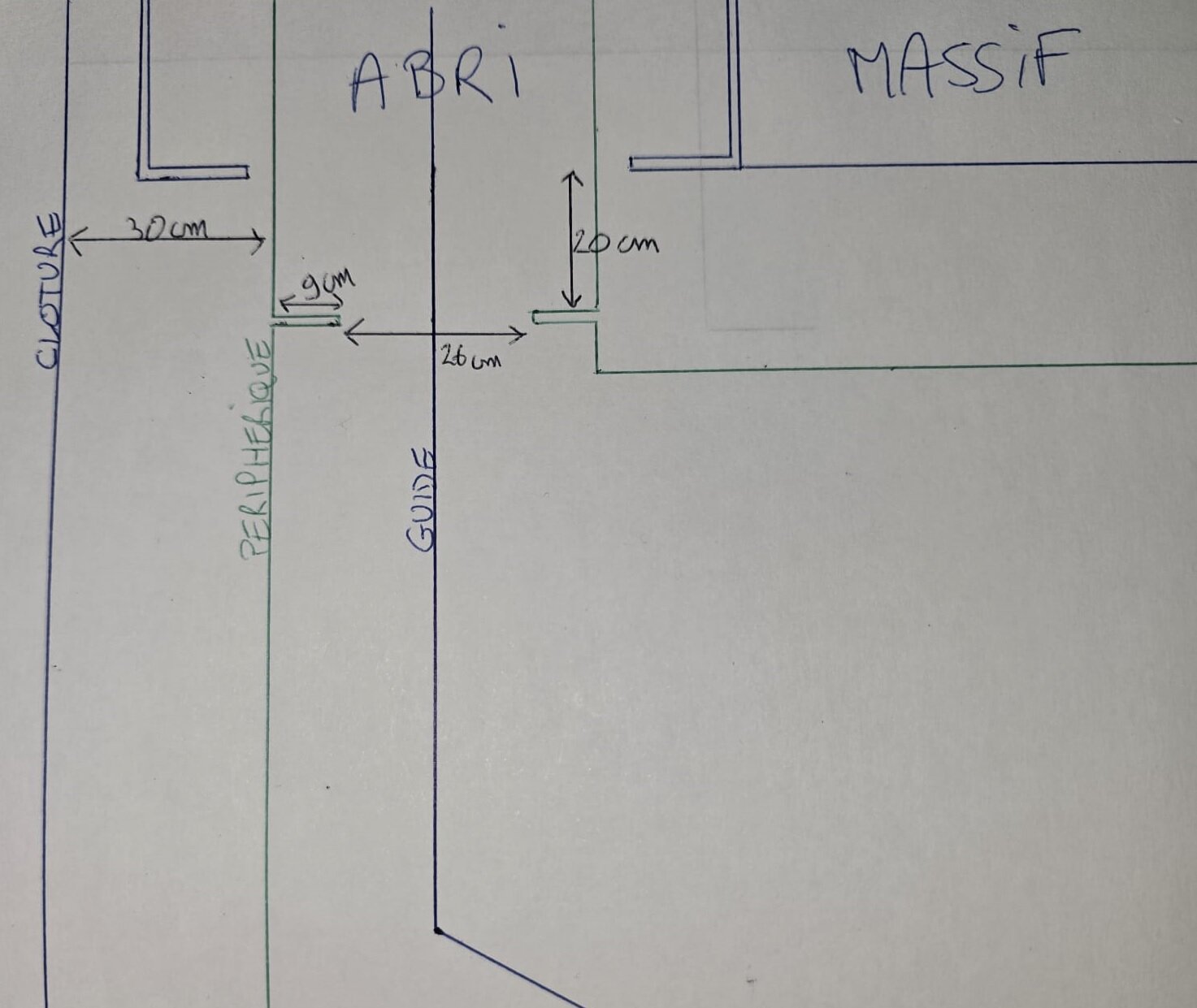
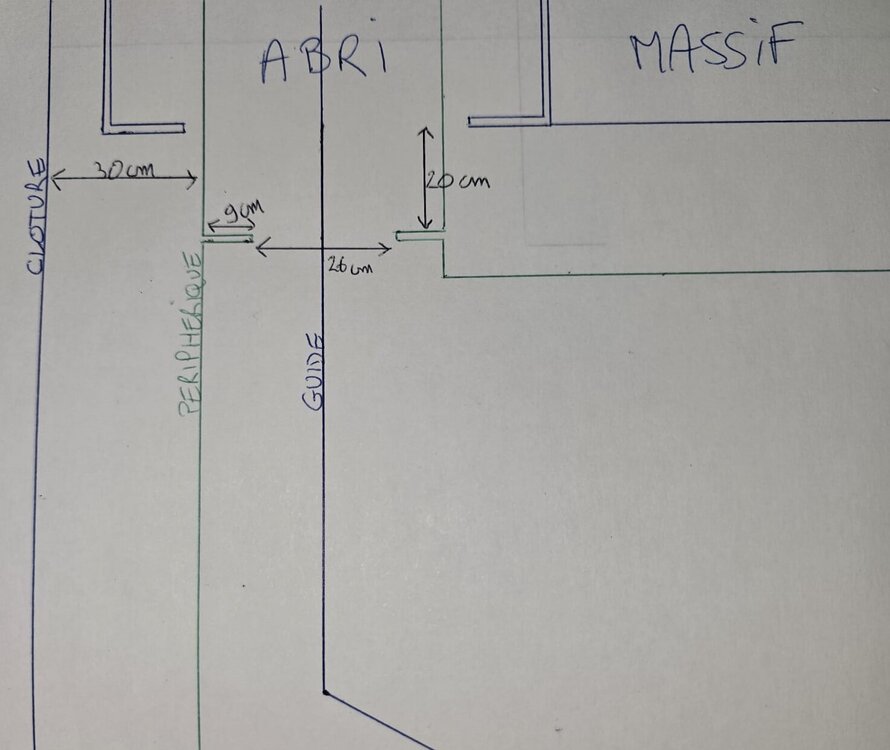
le schéma avant où le massif était dans le prolongement de la facade d'entrée de l'abri. En vert les périphériques. Tout fonctionnait parfaitement. Et maintenant avec un massif qui n'est plus dans le prolongement de la facade d'entrée de l'abri. le prolongement du massif en bleu fluo et la modification du périphérique en vert fluo. On voit bien que le fil périphérique n'est plus qu'à 20cm de la bordure du nouveau massif et le robot vient passer sa roulette arrière dedans au moment du retournement pour se garer. Le bordure de ce massif étant une bordure rigide qui dépasse de 5cm de terre, le robot se retrouve coincé car il n'arrive plus à faire sortir sa roue arrière qui reste bloqué derrière la bordure qu'il a franchi... Est ce que quelqu'un a une idée de comment positionner le fil périphérique pour que le robot puisse se garer mais aussi que pendant une tonte, il n'aille pas de balader dans l'abri... Et niveau conf, comment dire au robot de suivre le guide sur 3 bon mettre pour etre certain qu'à sa première manœuvre de virage pour sortir du guide, il n'aille pas mettre sa roue arrière dans le massif. Merci pour votre aide!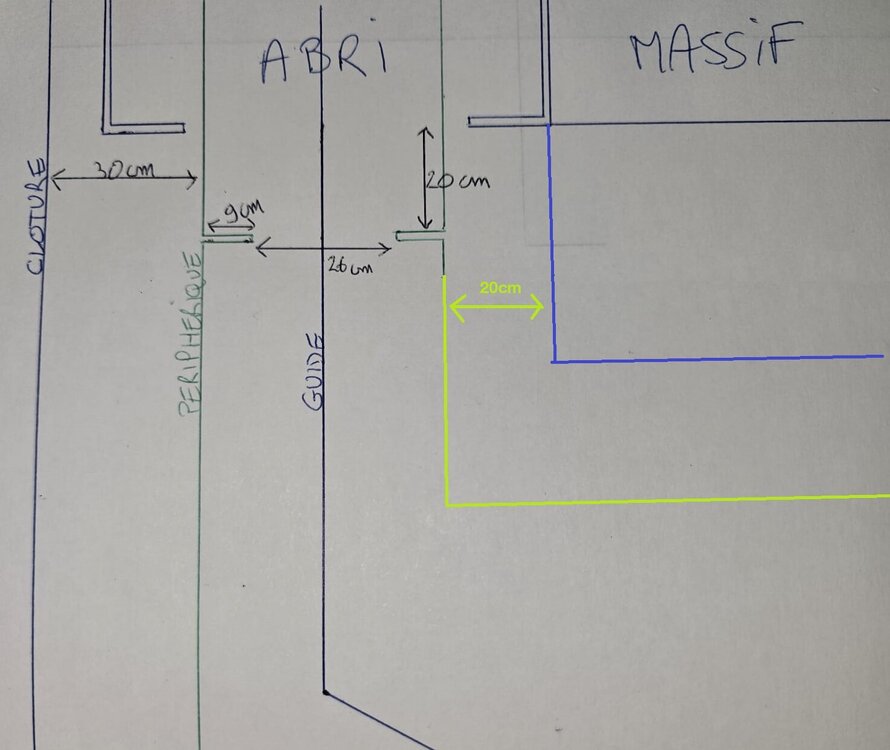
-
Aide à l'installation et à la configuration
pvodoz a répondu à un(e) sujet de pvodoz dans Installation de votre robot
La bordure n'existait pas auparavant, et le robot pouvait ainsi tourner tout de suite sur sa gauche en sortant. Cette bordure est maintenant en place, est en plastique (aucun ferraillage), dépasse au dessus du sol de 5cm et fait environ 45cm. J'ai du effectivement changer le positionnement du fil périphérique mais avec cette disposition, si je place le périphérique à 30 cm de la bordure, le fil est à 5cm du fil guide. Et lorsque robot se présente devant la base pour se garer, il se présente devant la base mais au moment de faire son demi tour, il stoppe en plein milieu parce que je pense qu'il empiète sur le fil périphérique. Du coup, étant sur une nouvelle disposition, je ne sais pas du tout comment faire pour placer le fil périphérique et aussi faire en sorte que le robot n'aille pas tondre sous son abri! Merci pour votre aide! PS: si besoin, je peux faire un schéma vu de dessus mais la photo me semble assez représentative de la disposition. -
Aide à l'installation et à la configuration
pvodoz a posté un sujet dans Installation de votre robot
Bonjour, Je possède un Automower 105 équipé d'un robonect. Voici une photo de l'endroit où le robot se range: Suite à l'ajout de la petite bordure de 45cm sur la droite, le robot n'arrive plus à sortir et à se garer. C'est souvent le même problème. A la sortie, le robot essaye de tourner à peine sorti de l'abri alors que le bordure de 45cm n'a pas encore été dépassée. La roulette arrière passe très souvent au dessus de la bordure et le robot se retrouve bloqué. Idem pour la rentrée ... le robot se présente devant l'entrée et commence à tourner puis avancer, reculer en répétition et fini par mettre sa roulette arrière par dessus la bordure... J'ai essayé différentes dispositions de fil périphérique mais sans succès. Cela finit bien souvent avec un fil arraché et coupé. Sauriez-vous me dire comment je dois disposer le fil périphérique devant l'ouverture de cet abri, et y a t'il moyen de dire au robot via robonect qu'il doit sortir le long du fil guide sur 3 ou 4 mètres avant d'essayer de tourner et de tondre? Merci pour votre aide!
.jpeg.9a1d003e10bcd82b5f0b0b69d4816ff5.jpeg)